
I received my Ph.D. from the School of Mechanical and Aerospace Engineering at Nanyang Technological University. My research endeavors are based in the Automated Driving and Human-Machine System (AutoMan) Lab, which is led by Prof. Chen Lyu. During my Ph.D. journey, I was fortunate to join and serve as intern researcher at OpenDriveLab led by Prof. Hongyang Li. I will join Xiaomi EV as postdoc and senior machine learning engineer.
My research center on the realm of autonomous driving and machine learning. The objective is to develop AI agents for prediction-guided decisions-making (PD-DM) in autonomous driving techniques. My research interest include reinforcement learning for world modeling, planning, and decision-making framework modeling for autonomous systems.
🔥 News
- 2026.01: 🎉🎉 Our R2SE paper has been accepted by T-PAMI. Cheers!
- 2025.11: 🎉🎉 Successfully passed the Ph.D Oral Defense.
- 2025.06: 🎉🎉 Our team received the 3rd Place of 2024 Waymo Open Dataset Interaction Prediction Challenge. Check out more for our team report and original implementation based on our BeTop paper.
- 2024.06: 🎉🎉 Our team won the Champion of 2024 Waymo Open Dataset Occupancy and Flow Prediction Challenge. Check out more for our team report and original implementation based on our HPP paper.
- 2023.08: 🎉🎉 Our GameFormer paper has been selected as Oral Presentation for International Conference on Computer Vision (ICCV)! Code is also available!
- 2023.07: 🎉🎉 Our ITSC special session on learning-powered prediction and decision-making has received 17 paper submissions, all of which were accepted. Congrats and looking forward to seeing you in Spain in September!
- 2023.07: 🎉🎉 Our GameFormer paper has been accepted by International Conference on Computer Vision (ICCV)! We will be releasing the code soon, so stay tuned for updates.
- 2023.07: 🎉🎉 Two of our papers on predictive decision-making/planning have been accepted by the International Conference on Intelligent Transportation Systems (ITSC)!
- 2023.06: 🎉🎉 Our team won the innovation award in the nuPlan Planning Challenge! Check out our report and presentation on our GameFormer Planner.
- 2023.06: 🎉🎉 Our team secured third place in the Waymo Open Dataset Motion Prediction Challenge! Our report is available on CVPR 2023 Workshop on Autonomous Driving.
- 2022.12: 🎉🎉 Our team won the Most Innovative Award and 3rd Place in both Track 1 and Track 2 at NeurIPS Driving SMARTS Competition! Check out our presentation on predictive decision-making at the official competition site.
📝 Publications
Recent Highlights
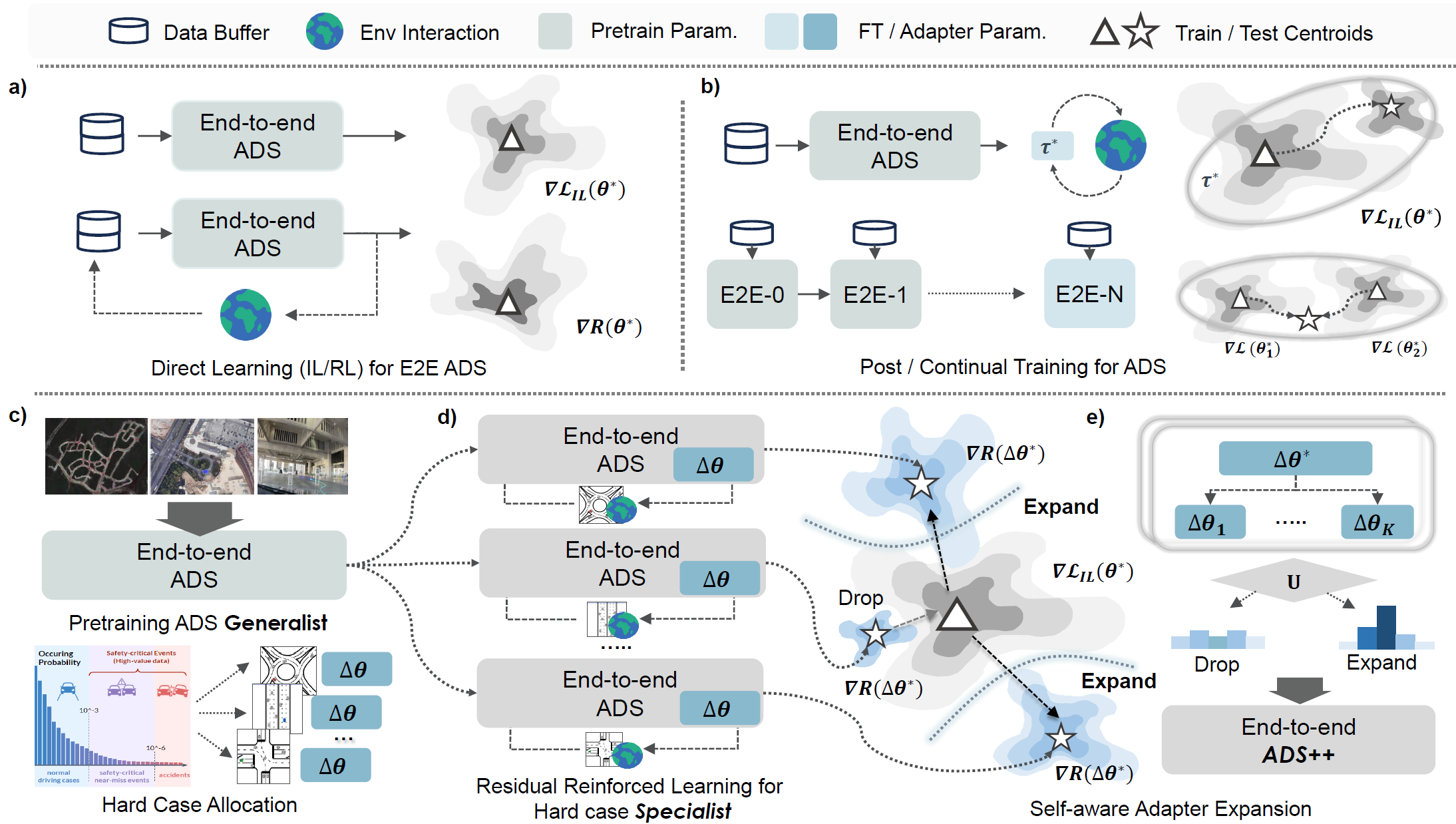
Reinforced Refinement with Self-Aware Expansion for End-to-End Autonomous Driving
Haochen Liu, Tianyu Li, Haohan Yang, Li Chen, Chaojun Wang, Ke Guo, Haochen Tian, Hongchen Li, Hongyang Li, Chen Lv
IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 2026
- A reinforced finetuning engine for end-to-end autonomous driving that enhances tail case performance while minimizing catastrophic forgetting.
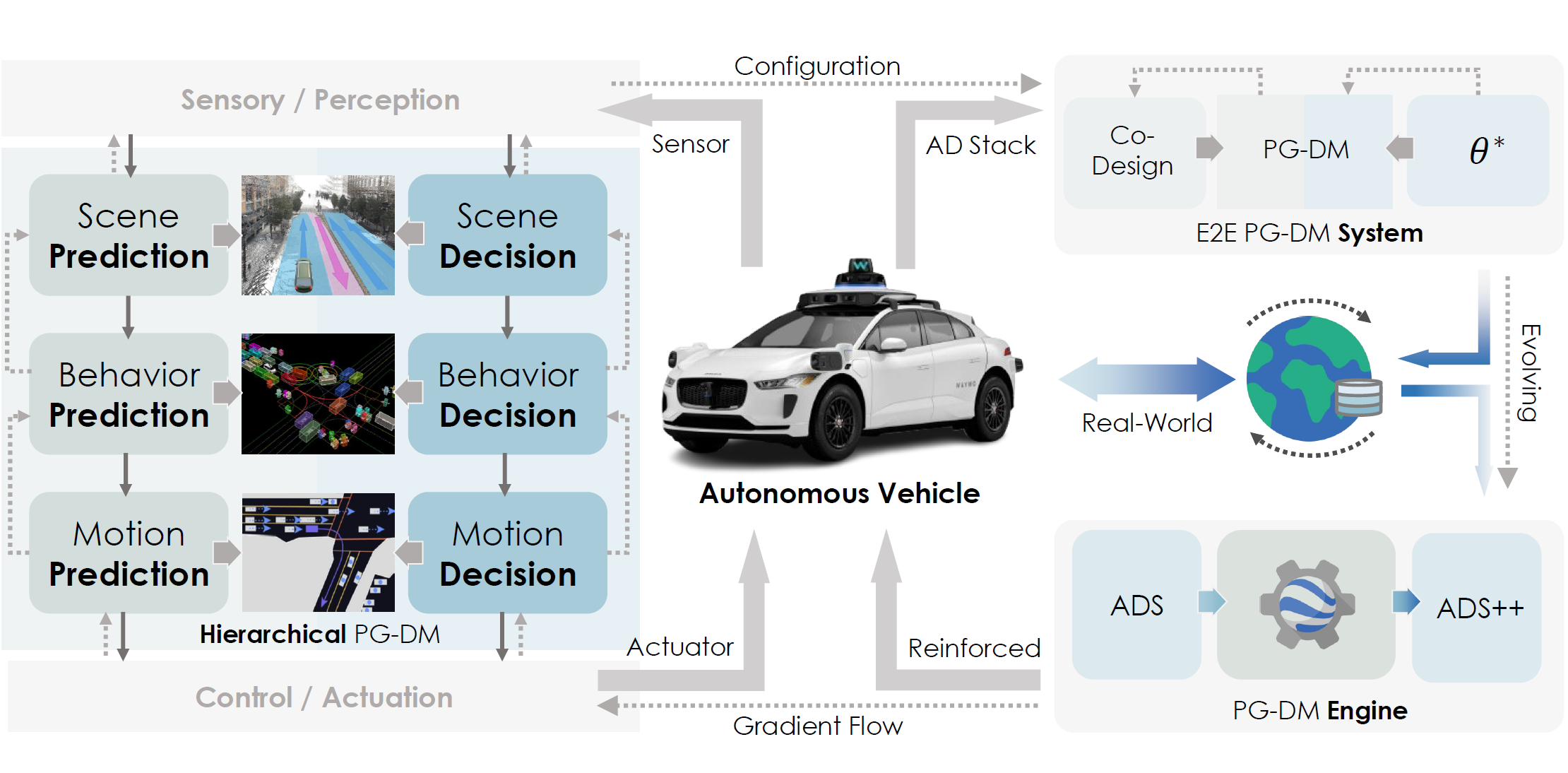
Prediction guided decision-making for autonomous driving
Haochen Liu
Ph.D. Thesis
- A structured framework comprising a series of methodologies for Prediction Guided Decision-Making (PG-DM) in autonomous driving.
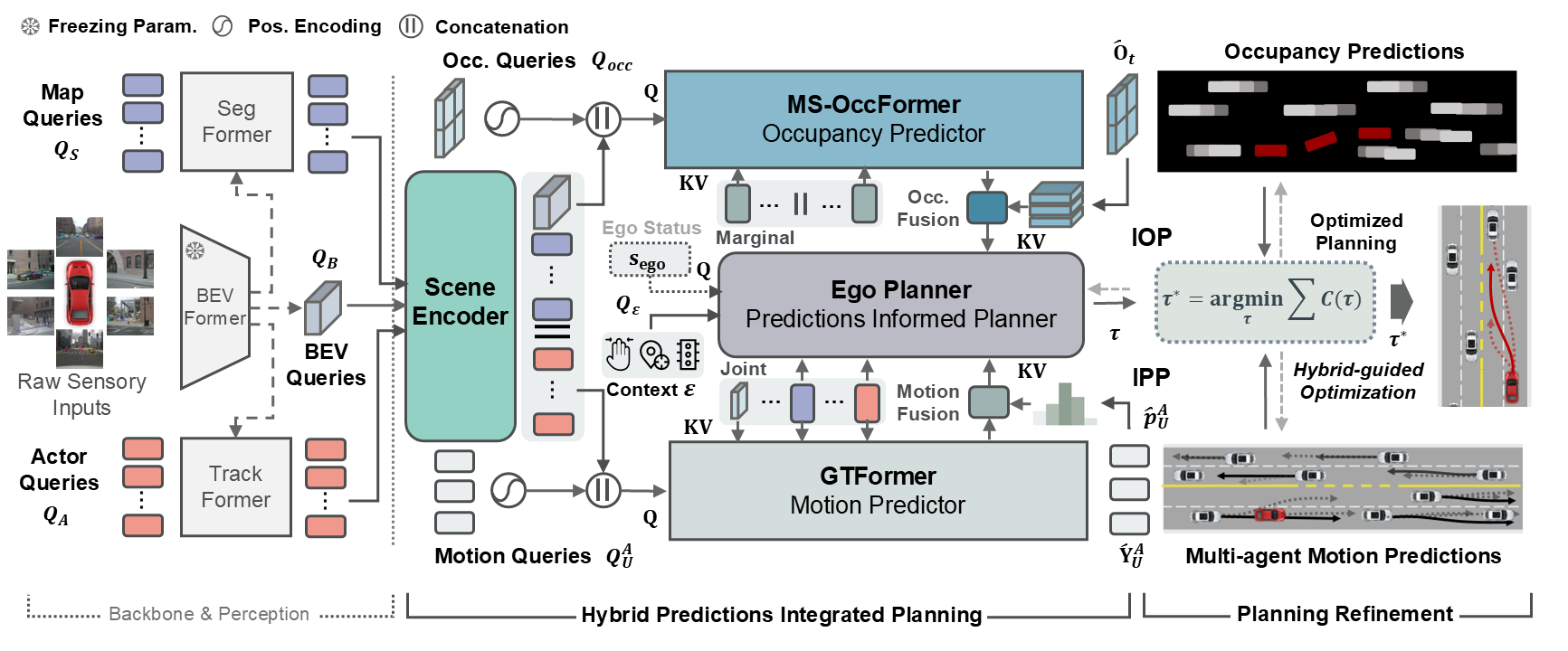
Hybrid-Prediction Integrated Planning for Autonomous Driving
Haochen Liu, Zhiyu Huang, Wenhui Huang, Haohan Yang, Xiaoyu Mo, Chen Lv
IEEE Transactions on Pattern Analysis and Machine Intelligence (T-PAMI), 2025

- A collborative design and optimization framework for end-to-end autonomous driving system that integrates hybrid prediction forms and motion planning.
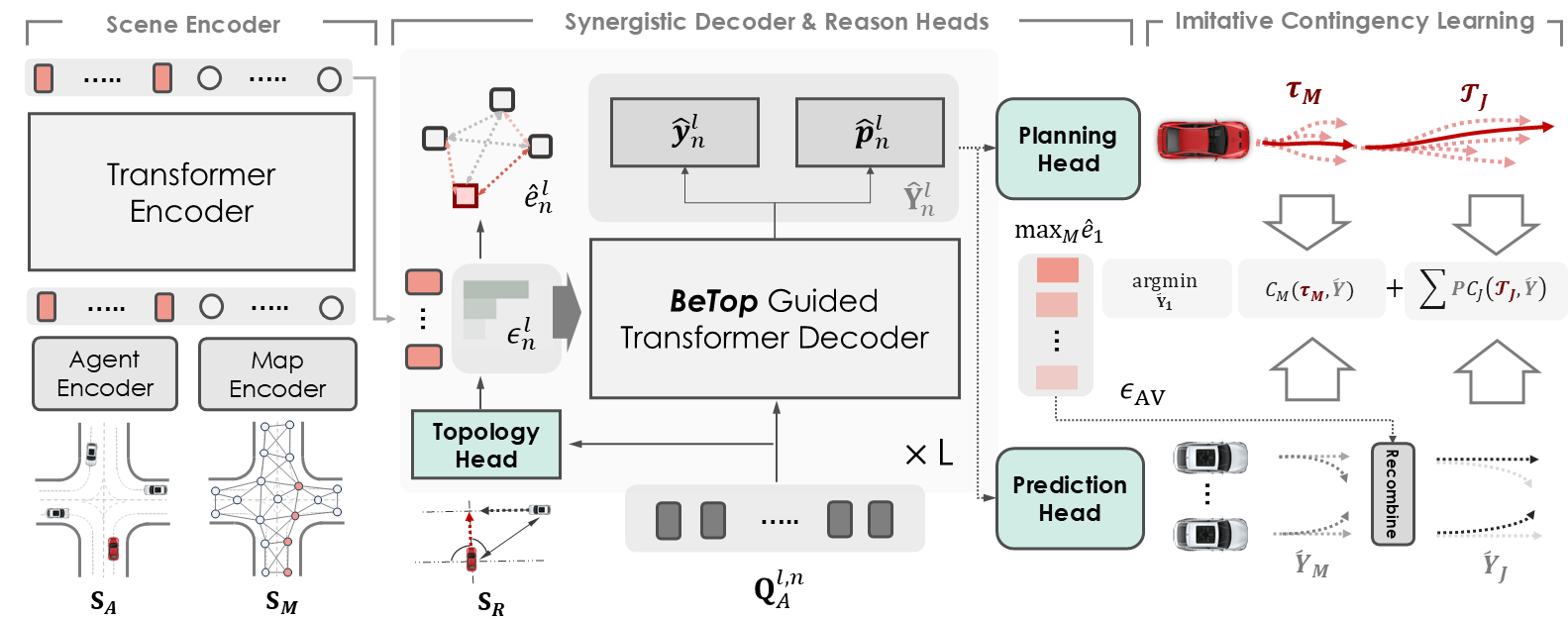
Reasoning Multi-Agent Behavioral Topology for Interactive Autonomous Driving
Haochen Liu, Li Chen, Yu Qiao, Chen Lv, Hongyang Li
Advances in Neural Information Processing Systems (NeurIPS), 2024

- A synergistic framework for interactive behavior reasoning that enhances multi-agent prediction and planning.
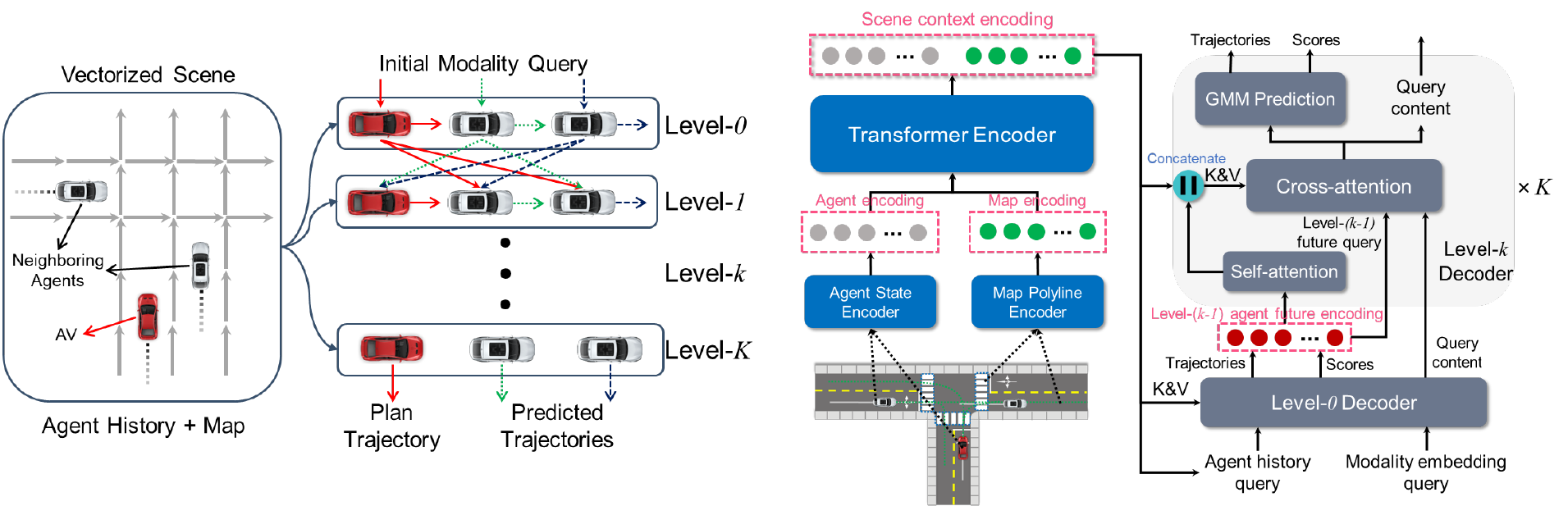
GameFormer: Game-theoretic Modeling and Learning of Transformer-based Interactive Prediction and Planning for Autonomous Driving
Zhiyu Huang*, Haochen Liu*, Chen Lv
IEEE/CVF International Conference on Computer Vision (ICCV Oral), 2023
Paper | Project | 

- We address the interaction prediction problem by formulating it with hierarchical game theory and implementing it with Transformer networks.
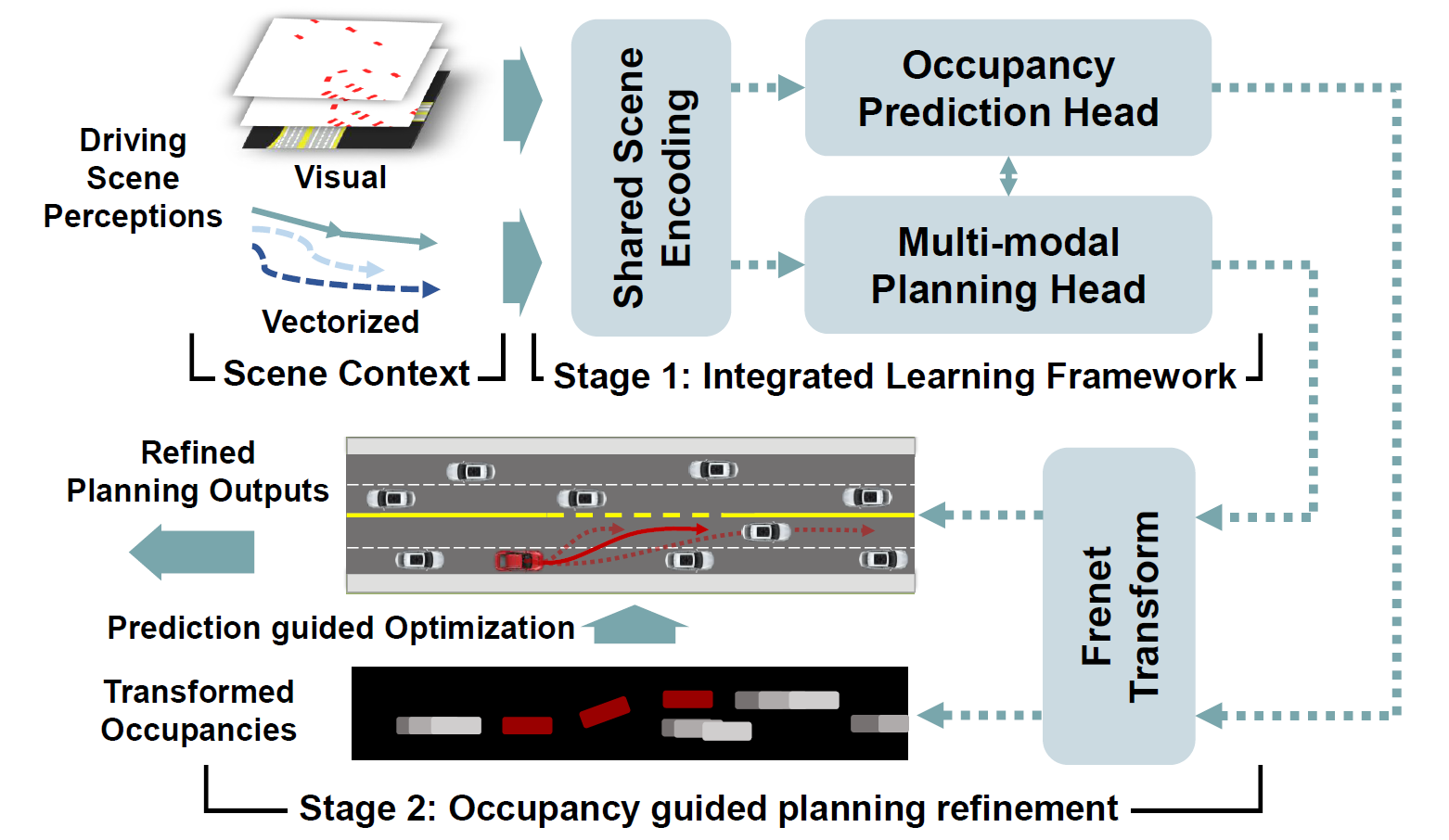
Occupancy Prediction-Guided Neural Planner for Autonomous Driving
Haochen Liu, Zhiyu Huang, Chen Lv
IEEE International Conference on Intelligent Transportation Systems (ITSC), 2023

- We propose a learning-based prediction-guided motion planner, that imitative planning trajectory is refined by transformed occupancy predictions in an intergated network.
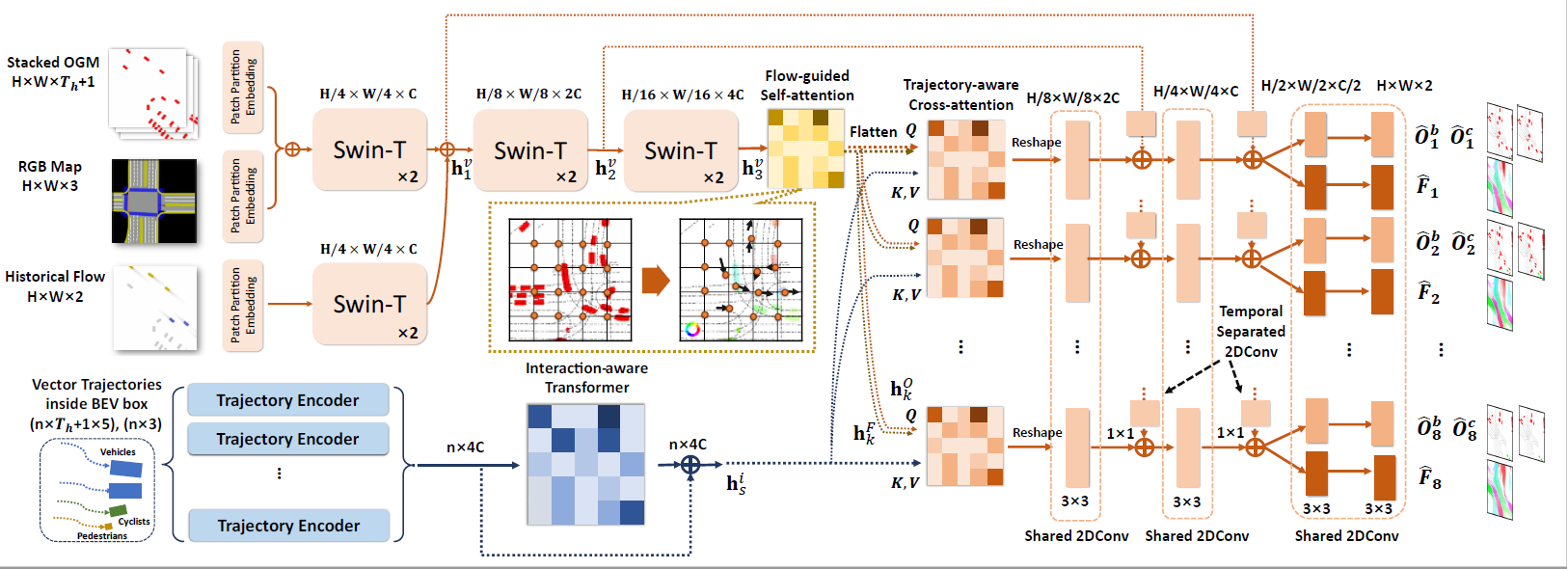
Multi-modal Hierarchical Transformer for Occupancy Flow Field Prediction in Autonomous Driving
Haochen Liu, Zhiyu Huang, Chen Lv
IEEE International Conference on Robotics and Automation (ICRA), 2023

- We develop a multi-modal hierarchial Transformer sturcture for long-term occupancy and flow prediction fusing visual and vector features from perception.
Talks
- 2024.12 Reasoning Multi-Agent Behavioral Topology for Interactive Autonomous Driving* in ADHeart
- 2024.06 Interactive Prediction and Planning for Autonomous Driving: Method and Thoughts in ADHeart, online. Link
- 2024.06 Prediction and Planning: Integration Methodology and Challenges in CVPR’24 wE2EAD, OpenDriveLab@Shanghai AI Lab, Shanghai. Link
Journal
-
Multimodal Multi-Agent Joint Traffic Simulation With Collision and Run-Off-Road Mitigation Xiaoyu Mo, Jintian Ge, Haochen Liu, Weigao Sun, Chen Lv, IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2025
-
Human-Guided Continual Learning for Personalized Decision-Making of Autonomous Driving Haohan Yang, Yanxin Zhou, Jingda Wu, Haochen Liu, Lie Yang, Chen Lv, IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2025
-
Safety-aware human-in-the-loop reinforcement learning with shared control for autonomous driving Wenhui Huang, Haochen Liu, Zhiyu Huang, Chen Lv, IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2024
-
Augmenting Reinforcement Learning with Transformer-based Scene Representation Learning for Decision-making of Autonomous Driving, Haochen Liu, Zhiyu Huang, Xiaoyu Mo, Chen Lv, IEEE Transactions on Intelligent Vehicles (T-IV), 2024
-
Differentiable Integrated Motion Prediction and Planning with Learnable Cost Function for Autonomous Driving, Zhiyu Huang, Haochen Liu, Jingda Wu, Chen Lv, IEEE Transactions on Neural Networks and Learning Systems (T-NNLS), 2023
-
Map-Adaptive Multimodal Trajectory Prediction Using Hierarchical Graph Neural Networks, Xiaoyu Mo, Yang Xing, Haochen Liu, Chen Lv, IEEE Robotics and Automation Letters (RA-L), 2023
-
Conditional Predictive Behavior Planning with Inverse Reinforcement Learning for Human-like Autonomous Driving, Zhiyu Huang, Haochen Liu, Jingda Wu, Chen Lv, IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2023
-
Map-Adaptive Multimodal Trajectory Prediction via Intention-Aware Unimodal Trajectory Predictors Xiaoyu Mo, Haochen Liu, Zhiyu Huang, Xiuxian Li, Chen Lv, IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2023
-
Quantitative identification of driver distraction: A weakly supervised contrastive learning approach Haohan Yang, Haochen Liu, Zhongxu Hu, Anh-Tu Nguyen, Thierry-Marie Guerra, Chen Lv, IEEE Transactions on Intelligent Transportation Systems (T-ITS), 2023

Conference
-
NeRC: Neural Ranging Correction through Differentiable Moving Horizon Location Estimation, Xu Weng, KV Ling, Haochen Liu, Bingheng Wang, Kun Cao, ACM/IEEE International Conference on Embedded Artificial Intelligence and Sensing Systems (SenSys), 2026
-
Learning Interaction-aware Motion Prediction Model for Decision-making in Autonomous Driving, Zhiyu Huang, Haochen Liu, Jingda Wu, Wenhui Huang, Chen Lv, IEEE International Conference on Intelligent Transportation Systems (ITSC), 2023 (Best Paper Award Runner-up)
-
Improved Deep Reinforcement Learning with Expert Demonstrations for Urban Autonomous Driving, Haochen Liu, Zhiyu Huang, Jingda Wu, Chen Lv, IEEE Intelligent Vehicles Symposium (IV), 2022

Preprints
-
Simscale: Learning to drive via real-world simulation at scale, Haochen Tian, Tianyu Li, Haochen Liu, Jiazhi Yang, Yihang Qiu, Guang Li, Junli Wang, Yinfeng Gao, Zhang Zhang, Liang Wang, Hangjun Ye, Tieniu Tan, Long Chen, Hongyang Li
-
DecompGAIL: Learning Realistic Traffic Behaviors with Decomposed Multi-Agent Generative Adversarial Imitation Learning, Ke Guo, Haochen Liu, Xiaojun Wu, Jia Pan, Chen Lv
-
iPad: Iterative Proposal-centric End-to-End Autonomous Driving Ke Guo, Haochen Liu, Xiaojun Wu, Jia Pan, Chen Lv


🎖 Honors and Awards
- 2025.06 3rd Place Winner, Waymo Open Dataset Interaction Prediction Challenge, CVPR Workshop on Autonomous Driving
- 2024.06 1st Place Winner, Waymo Open Dataset Occupancy and Flow Prediction Challenge, CVPR Workshop on Autonomous Driving
- 2023.06 Innovation Award, nuPlan Planning Challenge, CVPR Workshop on End-to-End Autonomous Driving
- 2023.06 3rd Place Winner, Waymo Open Dataset Motion Prediction Challenge, CVPR Workshop on Autonomous Driving
- 2022.12 3rd Place Winner, Most Innovative Award, Driving SMARTS Competition, NeurIPS Competition Track | [slides]
- 2022.06 2nd Place Winner, Waymo Open Dataset Occupancy and Flow Prediction Challenge, CVPR Workshop on Autonomous Driving
📖 Educations
- 2021.08 - 2025.11, Doctor of Philosophy, Nanyang Technological University, Singapore
- 2017.09 - 2021.06, Bachelor of Engineering, Automation, Beihang University, Beijing, China
💻 Internships
- 2024.01 - 2025.12, Intern Researcher, OpenDriveLab, Hong Kong SAR, China.
- 2021.06 - 2021.08 VC Intern, MiraclePlus, Beijing, China
- 2020.10 - 2021.06, Machine Learning Engineer (DATA-EDU), ByteDance, Beijing, China.